Советы [править]
- Если коптер не армится с «неродного» пульта, то, возможно, это происходит потому, что рабочие диапазоны каналов да и направление их отработки другие. Подключайтесь к MissionPlanner, заходите на вкладку меню калибровки аппаратуры, и добивайтесь в передатчике того, чтобы:
- все каналы отрабатывали в нужном направлении (реверсами)
- диапазоны каналов от 1100 до 1900 мс (эндпойнтами)
- среднее положение канала 1500 мс (сабтриммерами).
Если в передатчике есть лишний свободный канал, цепляйте его к Дево-М на вход AUX3, он будет виден в MissionPlanner как Ch8 и на него можно будет настроить тумблер, чтоб добавить полетный режим или какую-нибудь другую нужную функцию.
Обращайте внимание на настройки конфигурации коптера (меню сверху INITIAL SETUP / Mandatory Hardware-frame type): должно быть Х, но может «слететь» на +, например, при входе в Wizard. Коптер при этом теряет ориентацию в полёте, не может стабилизироваться и переворачивается.
- Если выполнены настройки на , то при включении режима RTL, не забывайте переводить FMOD в 0. Сразу после посадки режим переключается в один из устанновленных на FMOD и моторы могут не остановиться.
Полетный контроллер DEVO-M
Квадрокоптер qr x350 pro собран на основе контроллера с открытым кодом DEVO-M. При разработке контроллера инженеры DEVO-M воспользовались проектом ArduPilot. Начинающий пилот получает 4 полетных режима прямо из коробки:
- Stabilize Mode – стабилизационный режим, автоматическое выравнивание по горизонт;
- GPS Mode – удержание позиции и высоты про помощи GPS и барометрического датчика;
- RTH (return to home) – возврат в точку старта;
- HeadFree – безголовый режим.

Зато для опытного пилота эта платформа дает по-настоящему широкие возможности. Можно дополнительно настроить такие режим как:
- Follow Me – функция следования за объектом;
- Altitude – удерживание высоты;
- Acro – максимальные углы поворота, коптер автоматически не выравнивается (можно делать фигуры высшего пилотажа);
- Circle или Orbit – полет вокруг объекта с обращенным к объекту носом
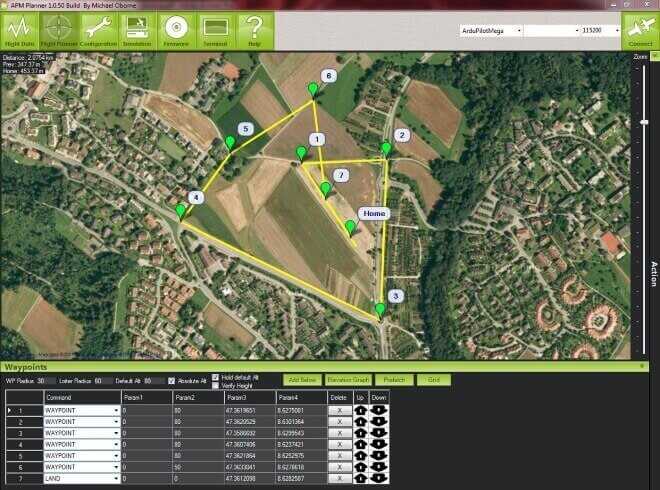
Все настройки производятся при помощи программы Mission Planner.
Mission Planner – это софт при помощи которого вы можете настроить параметры своего полетного контроллера, а также управлять своим дроном, в том числе указывать точки на карте, в которые дрон должен полететь, или планировать полет при помощи облета нескольких точек.

Варианты комплектаций квадрокоптера Walkera QR X350
Располагаются модели по увеличению цены и компонентам.
Некоторые квадрокоптеры продаются без ходового аккумулятора! Это позволяет пересылать их без ограничений любыми почтовыми службами.
Walkera QR X350 PRO FPV GPS

Минимальная цена и комплектация. Для полета необходимо докупить аппаратуру радиоуправления.
Вы можете прикрепить свою камеру для полетов, но потребуется изготовить крепление.
Walkera QR X350 GPS w/Devo RX702 (BNF)

От прошлой модели этот квадрокоптер отличается наличием USB порта на плате для обновления ПО квадрокоптера.
Все идущие ниже комплектации имеют порты для обновления.
Walkera QR X350 PRO FPV GPS DEVO 10 G-2D Gimbal

Передатчик расширенного радиуса действия (до 2-х км), ходовой аккумулятор, гироподвес для камеры.
Оптимальный выбор для FPV полетов и фото и видеосъемки с квадрокоптера.
Walkera QR X350 FPV GPS DEVO F7 5.8GHz Camera

Кроме обычного передатчика, ходового аккумулятора и зарядного устройства в комплект добавлена камера и видеопередачик на частоте 5.8 гигагерца. А так же аккумулятор к камере и видеопередатчику.
Передатчик DEVO F7 оснащен экраном который показывает передающееся с камеры изображение.

Как и прошлый квадрокоптер, этот может передавать видео с камеры на передатчик и его можно наблюдать на экране.
Экран оснащен откидывающимся козырьком для защиты от бликов солнца.
В комплекте идет камера iLook со встроенным видеопередатчиком 200 мвт на частоте 5.8 гигагерца. Квадрокоптер оснащен ходовой батареей, зарядным устройством и гироподвесом для камеры G-2D Gimbal.
Это самая полная комплектация квадрокоптера Walkera X350 которая есть в продаже.
Аккумуляторы для Walkera X350
Обратите внимание, что часть комплектаций идет без аккумуляторов. Да и даже если вы купили комплект с аккумулятором, то разве можно выходить всего на один полет? Я обычно беру с собой 4 аккумулятора, их хватает на 2-3 часа полетов.
Для полета без FPV камеры вам потребуется ходовой аккумулятор 3S 2000 мАч
NanoTech это наиболее лучшие аккумуляторы имеющие в продаже по соотношению цена/качество.
Для полетов с камерой на Walkera QR X350 нужен аккумулятор 3S 5200 мАч
Это штатный аккумулятор для Walkera X350, такой же идет в FPV комплектах.
Купить аккумулятор для квадрокоптер Walkera QR X350 можно тут.
Вы можете использовать его и для полетов без камеры, большая емкость позволит летать дольше, но, при этом, больший вес заставит квадрокоптер вести себя более «степенно».
→
→
→
→
→
→
→
→
Технические характеристики
| Размеры (длина х ширина х высота) | 289 х 289 х 289 мм |
| Длина по диагонали | 350 мм |
| Полетный вес | ≤1350 г |
| Диаметр пропеллера | 556 мм |
| Длина пропеллера | 232 мм |
| Модель мотора | WK-WS-28-008C |
| Модель электронных регуляторов скорости | WST-15A (G/R) |
| Полетный контроллер | DEVO-M |
| Максимальное время полета | 25 минут |
| Емкость | 5200mAh |
| Тип | литий-полимерный аккумулятор |
| Напряжение | 3S2P / 3 ячейки/ 11.1V |
| Разрядка | 10С |
| Вес | 317 г |
| Размеры | 103 x 33.5 x 41.5 мм |
| Зарядное подходит для розеток напряжением в | 100-240V |
| Ток на выходе | 0.8А |
| Ток на входе | 15-18V — 1A |
| Модель | G-2D |
| Подходит для | GoPro/iLook Camera |
| Макс. скорость изменения азимута | 2000/сек |
| Максимальная величина перегрузки | 16 г |
| Управляющая частота | 1,000 Hz |
| Точность | 0.1° |
| Диапазон управления | 45℃~45℃ |
| Размеры | 11 x 9.5 x 7.5 см |
| Вес | 262 г |
| Разрешение видео | 1280×720 |
| Разрешение фото | 1 МП |
| Частота кадров | 30 к/с |
| Формат видео | AVI |
| Рабочая частота передачи видео | 5.8Ghz |
| Вес | 125 г |
| Рабочая частота | 2.4Ghz |
| Количество каналов | 7 |
| Мощность на выходе | ≤100mW |
| Потребление тока | ≤230mA |
| Выходной импульс | 1000-2000mS |
| Чувствительность | -105dBm |
| Радиус управления | до 1 км |
| Рабочая частота | 2.4Ghz |
| Количество каналов | 7 |
| Мощность на выходе | ≤100mW |
| Потребление тока | ≤230mA |
| Выходной импульс | 1000-2000mS |
| Чувствительность | -105dBm |
| Радиус управления | до 1 км |
| Дальность передачи видео онлайн | 500 м — 1 км |
| Рабочая частота | 2.4Ghz |
| Количество каналов | 10 |
| Мощность на выходе | ≤100mW |
| Потребление тока | ≤230mA |
| Выходной импульс | 1000-2000mS |
| Чувствительность | -105dBm |
| Радиус управления | до 2 км |
Комплектация
Всего существует две версии комплектации Walkera QR X350 PRO: базовая и FPV.
Существует 3 базовые версии:
- RTF 1
- RTF 2
- RTF 3
Покупая RFT 1, вы, кроме квадрокоптера, получаете аккумулятор, зарядное и пульт управления DEVO 7.
В комплектации RTF 2 вы получаете все то же самое, только пульт управления DEVO 7 заменен на пульт ДУ DEVO 10.
В комплектации RTF 3 ко всем вышеперечисленным вещам добавляется карданная подвеская G-2D для камеры.
FPV-версия также именуется RTF 4 и в ней пульт управления DEVO 10 заменен на DEVO 7F, а в комплекте также идет камера iLook.
Пульт DEVO 10 имеет 10 каналов управления, потому радиус его действия доходит до 2 километров, вместо 1 километра у DEVO 7 и DEVO 7F, но последний сразу оснащен LCD-дисплеем, на который может транслироваться видео с камеры в режиме онлайн на расстоянии до 500 метров, в зависимости от рельефа местности.
Впрочем, если финансы позволяют, можно приобрести более мощный передатчик видео и использовать видео очки. Вкупе с пультом DEVO 7 радиус передачи видео будет равняться аж 1 километру!
Более дешевым вариантом является приобретение отдельного Wi-Fi передатчика, а в качестве экрана для камеры использовать смартфон или планшет (у DEVO 10 есть специальное крепление для таких девайсов). В таком случае, вы сможете управлять коптером на расстоянии 2 километров, а видео будет передаваться с расстояния в 400 метров.
Телеметрия [править]
Можно установить блок телеметрии Walkera WK-CTL01-D, в комплекте есть 2 провода для измерения напряжения и 4 датчика температуры.
Отдельно можно приобрести датчики
- RPM (WK-MP-RPM)
- GPS (WK-GPS) — для фиксирования координат, высоты, скорости, даты, времени.
Разъемы шлейфов Molex PicoBlade 1.25mm (они также используются в микро батареях 1S LiPo).
miminOSD бывают разные, в основном 2 типа
- обычная minimOSD, она все данные берёт из контроллера devo;
- minmOSD KV team mod, к которой можно подключать внешние датчики тока, напряжения и RSSI, и не надо ничего паять на DEVO для RSSI. Но данные можно также брать и с контроллера DEVO.
Настройка ArduPilot [править]
Всё, что описано, вы делаете на свой страх и риск. За последствия никто ответственности не несёт.
Внимание! Не подключайте USB вместе с батареей, если не уверены в исправности коптера. При неисправности питания можно пожечь USB порт.. Внимание! Для настройки DEVO-M желательно пользоваться Mission Planner версии не новее 1.3.28, т.к
в более новых вырезана часть функций. Например, очень нужной для Walkera QR X350 PRO функции в свежих версиях нет.
Внимание! Для настройки DEVO-M желательно пользоваться Mission Planner версии не новее 1.3.28, т.к. в более новых вырезана часть функций
Например, очень нужной для Walkera QR X350 PRO функции в свежих версиях нет.
Полезные параметры
См. также , а здесь перечислены только те, по которым есть замечания.
AHRS_GPS_MINSATS — Раньше было значение 6, но в версии 1.1 стало = 7. То есть коррекция будет отключаться, если спутников меньше 7. А раньше отключалась, если меньше 6. Параметр лучше поправить в MissionPlanner, а не прошивать через софт от Walkera, который ещё и драйвер подменяет.
Настройка параметра FS_GPS_ENABLE
- — На версии не PRO делали специальный аппаратный мод для его отключения.
- — минимальное значение напряжения батареи, при достижении которого (и ниже) начинает мигать правый светодиод и срабатывает программа, выбираемая параметром . По сути, мигание правого глаза означает, что просто села батарейка и летать больше нельзя.
- — в DEVO-M установлен в значение Disabled. При этом QR X350 PRO может улететь, если произойдет глюк GPS.
FS_THR_ENABLE — необходимо помнить про особенности файлсейва с приемникам RX703 и RX703A.
WPNAV_SPEED — По умолчанию 300 см/с, но можно установить 900, чтобы коптер домой летел шустро. В принципе, он может и 1500 лететь, но при этом быстро расходуется аккумулятор. 900 — оптимальная скорость с точки зрения покрываемого расстояния по отношению к истраченным амперам .
WPNAV_LOIT_SPEED — По умолчанию 500, можно увеличить до 700.
PILOT_VELZ_MAX — По умолчанию 250, можно поставить 500.
COMPASS_ORIENT — По умолчанию = 4, что соответствует ROTATION_YAW_180 на закладке настройки компаса. Этот параметр вызывает множество вопросов, поскольку он стоит на ноге под углом совсем не в 180°, но если снять крышку компаса, то можно увидеть микросхему сориентированную правильно против курса.
COMPASS_LEARN — по умолчанию равен 1. (см. раздел FAQ «Как правильно калибровать компас»).
Примеры назначения режимов
- Для переназначения режима полета в МissionРlanner заходим на страницу CONFIG/TUNING закладка Extended Tuning. Параметр Ch7 Opt был Simple Mode, меняем на RTL. Сохраняем, нажав Write Params. Переходим на закладку Flight Modes и параметр Flght Mode 6 c RTL меняем на Circle. Сохраняем, нажав Save Modes. Теперь у нас в третьем положении тумблера вместо возврата домой — круг, а возврат домой теперь будет на тумблере IOC. Параметры круга меняются в Full Parametr List. CIRCLE_RADIUS — радиус круга в метрах, по умолчанию 10. CIRCLE_RATE — угловая скорость выполнения круга в градусах в секунду, по умолчанию 20.
Советы по параметрам
- Можно загрузить старые параметры (если они были сохранены) и воспользоваться опцией «сравнить», чтобы определить что повлияло на поведение коптера.
- «Откатиться» на заводские настройки можно с помощью файлов параметров «по умолчанию», которые есть в разделе .
Можно перешить DEVO-M в полноценный Аrdupilot при помощи доработки SPI интерфейса. На плате контроллера есть шесть отверстий — это SPI — последовательный периферийный интерфейс к Арду2560. К нему подключаем программатор для Ардуины, например USBASP, загливаем бутлоадер Ардукоптера, после чего контроллер можно прошить по USB через MissionPlanner. Вернуться на исходную прошивку можно и с неродным бутлоадером, залив расшифрованную прошивку . Бутлоадер APM .
Технические характеристики
В ясную погоду QR X350 Pro проявляет приемлемые летные свойства, перед использованием требуется настроить компас и гироскоп, что позволит квадрокоптеру обрести стабильность и устойчивость к авариям для защиты электроники.
Время нахождения в воздухе насчитывает 25 минут, калибровка камеры уменьшает промежуток до 15 минут.Диапазон приема сигнала зависит от средств управления и может достигать 2 км. В режиме FPV рекомендуемая дальность полета составляет 400 м. Предельное время пользования достигается при скорости до 35 км/ч.
На дроне используется вентильный двигатель WK-WS-28-008C.
- Дальность полета: до 2 километров
- Время полета: 20-25 минут
- Максимальная горизонтальная скорость 12 м/c
- GPS: функция возвращения на исходную точку, телеметрия
- HeadLess Mode: нажатием тумблера справа можно облегчить пилотирование
- FPV: 500-1000 метров, трансляция на пульт
- Камера: iLook, GoPro
- Масштаб: 288x288x206 мм
- Расстояние между моторами: 345 мм
- Взлетный вес: до 1400 г
- Длина пропеллера: 232 мм
- Трансмиттер Devo f7
Модель оборудована полетным контроллером DEVO-M, который делает возможным стабильный полет аппарата, удерживает положение по GPS и стабилизирует двухкамерный бесколлекторный подвес. Контроллер располагает обновленным регулятором высоты, работающим по GPS.
| Размеры (длина х ширина х высота) | 289 х 289 х 289 мм |
| Длина по диагонали | 350 мм |
| Полетный вес | ≤1350 г |
| Диаметр пропеллера | 556 мм |
| Длина пропеллера | 232 мм |
| Модель мотора | WK-WS-28-008C |
| Модель электронных регуляторов скорости | WST-15A (G/R) |
| Полетный контроллер | DEVO-M |
| Максимальное время полета | 25 минут |
| Емкость | 5200mAh |
| Тип | литий-полимерный аккумулятор |
| Напряжение | 3S2P / 3 ячейки/ 11.1V |
| Разрядка | 10С |
| Вес | 317 г |
| Размеры | 103 x 33.5 x 41.5 мм |
| Зарядное подходит для розеток напряжением в | 100-240V |
| Ток на выходе | 0.8А |
| Ток на входе | 15-18V — 1A |
| Модель | G-2D |
| Подходит для | GoPro/iLook Camera |
| Макс. скорость изменения азимута | 2000/сек |
| Максимальная величина перегрузки | 16 г |
| Управляющая частота | 1,000 Hz |
| Точность | 0.1° |
| Диапазон управления | 45℃~45℃ |
| Размеры | 11 x 9.5 x 7.5 см |
| Вес | 262 г |
| Разрешение видео | 1280×720 |
| Разрешение фото | 1 МП |
| Частота кадров | 30 к/с |
| Формат видео | AVI |
| Рабочая частота передачи видео | 5.8Ghz |
| Вес | 125 г |
| Рабочая частота | 2.4Ghz |
| Количество каналов | 7 |
| Мощность на выходе | ≤100mW |
| Потребление тока | ≤230mA |
| Выходной импульс | 1000-2000mS |
| Чувствительность | -105dBm |
| Радиус управления | до 1 км |
| Рабочая частота | 2.4Ghz |
| Количество каналов | 7 |
| Мощность на выходе | ≤100mW |
| Потребление тока | ≤230mA |
| Выходной импульс | 1000-2000mS |
| Чувствительность | -105dBm |
| Радиус управления | до 1 км |
| Дальность передачи видео онлайн | 500 м — 1 км |
| Рабочая частота | 2.4Ghz |
| Количество каналов | 10 |
| Мощность на выходе | ≤100mW |
| Потребление тока | ≤230mA |
| Выходной импульс | 1000-2000mS |
| Чувствительность | -105dBm |
| Радиус управления | до 2 км |

Контроллер оснащен усовершенствованным датчиком высоты, который работает в паре с GPS, что позволяет QR X350 PRO зависать на одном месте без корректировки положения пилотом. При потере сигнала или по команде с передатчика QR X350 автоматически прилетит к точке старта и приземлится! Модель оснащена система аварийной сигнализации, которая предупредит о низком напряжении и необходимости приземлиться.
Особенности
- Полный комплект, есть все, что необходимо для полета
- В комплекте полное оборудование для FPV
- В комплекте FPV камера iLook HD
- Батарея LiPo высокой емкости 3S 5200мАч
- Время полета до 25 минут
- Улучшенная, точная система стабилизации полета
- Удержание положения по GPS
- Датчик высоты и компас
- Подвес G-2D на бесколлекторных двигателях совместим с камерами iLook и GoPro Hero 3
- Функция возврата в точку старта
- Режим висения на точке по GPS с удержанием высоты
- Возврат в точку старта и автоматическое приземление при потере сигнала
- Сигнализация при низком напряжении
- Полностью программируемый передатчик DEVO F7 со встроенным цветным дисплеем
- Зарядное устройство с встроенным балансиром
- Яркие светодиоды
Благодаря емкому аккумулятору и широкому диапазону доступности сигнала управлять квадрокоптером гораздо удобнее. Вмонтированный GPS не дает повода беспокоиться о потере прибора — при утерянном сигнале или вероятности разрядки аккумулятора квадрокоптер самостоятельно возвращается на исходную позицию.
При помощи интегрированной системы стабилизации и камеры на подвесе можно снимать видео хорошего качества. Благодаря этому Walkera QR x350 PRO FPV востребован в коммерческой сфере.
Для любительской съемки хватает камеры iLook, при необходимости профессиональной деятельности лучше поставить GoPro. Камерный подвес перемещается в 2 плоскостях. Квадрокоптер управляется разной радиоаппаратурой от 6 каналов. При наличии передатчика следует приобрести QR X350 PRO в комплектации BNF.
Преимущества и недостатки
Плюсы модели:
- Оптимальная цена.
- Совместимость с разными экшн камерами.
- Разные варианты комплектации (камера iLook+ или GoPro, пульт DEVO 7, 10, 7F или F12E).
- Неплохие лётные характеристики.
- GPS-модуль.
- Несколько режимов полёта.
- Работа с Mission Planner.
Минусы:
- Сомнительное качество сборки.
- Длительная подзарядка.
- Плохое удержание позиции в ветреную погоду.
- При эксплуатации быстро появляются трещины под пропеллерами в области моторов.
- Аппарат изначально не откалиброван.
В целом, как мы уже сказали, это один из лучших квадрокоптеров для экшн камеры. Также рекомендуем просмотреть видео обзор Walkera QR X350 PRO:
Аналоги:
—>
Квадрокоптер Walkera QR X350 PRO летает на расстояние до 2 километров и может держаться в воздухе до 25 минут. Из-за вентильного двигателя и электронного регулятора скорости движение аппарата стало более управляемым. Необходимо просто установить подвес, закрепить камеру и снимать пейзажи с высоты. Запуск осуществляется при помощи пульта ДУ, оснащенного LCD-экраном. За счет встроенного модуля GPS квадрокоптер возвращается в исходную точку, если радиосигнал потерян.
Обзор
Внешний вид QR X350 PRO очень сильно смахивает на дизайн популярного квадрокоптера DJI Phantom 2, особенно сходство заметно в лучах коптера. Что уж говорить о пропеллерах — они также девятидюймовые, как и у более дорогого аналога.
Моторы у QR X350 PRO бесщеточные, оснащены электронными регуляторами скорости WST-15A. Это позволило сделать полет квадрокоптера более плавным и управляемым.
Что касается полетного контроллера, то официально таким значиться DEVO-M. Однако, как оказалось, по факту на квадрокоптер установлен ArduPilot. Среди его функций есть система автопилота, режим возврата домой, режим стабилизации и зависания в воздухе:

Квадрокоптер оснащен мощным аккумулятором емкостью 5200mAh (аккумулятор такой же мощности установлен на втором Фантоме и его модификациях), что позволяет находиться коптеру в воздухе в течении 25 минут. Разумеется, с установкой подвески и камеры, время полета уменьшается, но даже во время максимальной нагрузки полетное время вряд ли будет меньшим 15 минут.
В нижней части корпуса квадрокоптера крепиться крепление для камеры G2-D. Он подходит для камер GoPro и iLook. Их нужно докупать отдельно, но iLook можно купить вместе с квадрокоптером. Кроме записи видео, видео с камеры можно видеть в режиме онлайн.
Управление квадрокоптером осуществляется посредством пульта дистанционного управления. В зависимости от комплектации, это может быть DEVO 7, DEVO 7F и DEVO 10. Подробнее о них ниже.

Что (не)может DEVO-M [править]
Изначально в QR X350 PRO доступны только четыре режима полета ArduPilot.
- Stabilize Mode — выравнивание по акселерометрам в горизонт. Обычный режим полёта.
- Loiter Mode — удержание в точке по GPS и барометрическому датчику высоты.
- RTL Mode — возвращение в точку взлёта и автоматическая посадка.
- Simple Mode — управление коптером не зависит от того, куда смотрит его перед.
Какие полётные режимы можно реализовать:
- Acro Mode — акселерометры практически не участвуют в выравнивании коптера, коптер управляется как классический вертолет, может делать кувырки.
- Auto Mode — автоматически летит по заранее запрограммированной миссии.
- Circle Mode — летает круг носом в центр автоматически, пилот управляет только высотой.
- Drift Mode — летает как самолет с элеронами, при крене доворачивает по курсу.
- Follow Me! — следует за объектом, требуется и GPS у объекта слежения.
- Guided Mode — управляется с наземной станции по : немедленно летит в указанную точку на карте на планшете, смартфоне или ноутбуке.
- Loiter Mode — удержание в точке по GPS и барометрическому датчику высоты.
- Position Hold — удержание в точке по GPS, высота управляется пилотом с помощью газа без датчика высоты (На DEVO-M включается только по радиомодему через DroidPlanner. C пульта не включается).
- RTL Mode — возвращение в точку взлёта и автоматическая посадка.
- Simple Mode — управление коптером не зависит от того, куда смотрит его перед.
- Super Simple Mode — коптер управляется так, как будто он всегда передом от пилота, независимо от реального направления Home Lock.
- Sport Mode — то же самое, что и Acro Mode, но с удержанием высоты.
- Stabilize Mode — выравнивание по акселерометрам в горизонт. Обычный режим полёта.
Также по умолчанию отключена полезная функция Geo Fence, виртуальный забор, коптер возвращается в точку взлёта если он улетает слишком высоко или далеко.
И отсечка установлена на 10,7В, что не позволяет использовать полную ёмкость аккумулятора, это тоже можно изменить.
Конструкция
Камера и подвес
В зависимости от комплектации квадрокоптер может быть оснащён топовой камерой iLook+ и пультом FPV с встроенным 5.8ГГц FPV-модулем, или камерой GoPro. Первый вариант позволяет одновременно производить фото- и видеосъёмку, а также трансляцию видеопотока в онлайн-режиме без задержки. Максимальное разрешение фото: 4032х3024 JPEG. Максимальное разрешение видео: 1920х1080р при 30 кадр/с. Все данные сохраняются на карте памяти MicroSD.
Камера
С возможностями камеры GoPro более подробно можно ознакомиться в другом обзоре.
Уникальный двухосевой механический подвес G-2D подключается к плате управления и запитывается от аккумуляторной батареи квадрокоптера. Как было сказано ранее, подвес адаптирован под работу и с iLook+ и с GoPro. Он обеспечивает стабилизацию изображения с помощью мягких прокладок и пары моторов.
Полётный контроллер
Walkera QR X350 PRO оснащён полётным контроллером DEVO-M, обеспечивающим стабильный полёт и удержание положения по GPS. Кроме того он стабилизирует подвес.
Управление квадрокоптером может осуществляться с помощью одного из четырёх пультов управления:
- DEVO 7 (семи канальная 2.4 ГГц).
- DEVO 10 (десяти канальная 2.4 ГГц).
- DEVO 7F (семи канальная FPV аппаратура управления с восьми канальным VTX 5.8 ГГц и 3.5-дюймовым LCD дисплеем).
- DEVO F12E (двенадцати канальная FPV аппаратура управления с тридцати двух канальным VTX 5.8 ГГц и 5-дюймовым LCD дисплеем).
Варианты пультов
Программное обеспечение
Mission Planner – утилита, позволяющая устанавливать формат контроллера и управлять работой дрона, обозначать точки направления на карте, строить маршрут и т.п.
Важным отличием утилиты является способность пилотировать квадрокоптер, не применяя пульт и не строя маршрут заранее. В разделе с картами путём нажатия на дисплей в любом месте необходимо выбрать функцию Fly To Here, и Walkera QR X350 PRO направится в заданную точку и зависнет в ожидании следующей команды.
Батарея и зарядка
Квадрокоптер по умолчанию оснащён трёхбаночной литий-полимерной аккумуляторной батареей 5200 мА*ч. Это позволяет беспилотнику осуществлять автономный полёт на протяжении 25 минут, а с полной нагрузкой около 15 минут. Длительность зарядки аккумулятора порядка 5-7 часов.
Габаритные размеры батарейного отсека: 45×34×111 миллиметров.
Моторы
Квадрокоптер Walkera QR X350 PRO укомплектован бесколлекторными моторами PRO-Z-06B Convex Cover WK-WS-28-008C. 990 KV в совокупности с 9-дюймовыми пропеллерами обеспечивают необходимый запас тяги. Потенциала достаточно для осуществления поставленных задач.
Мотор
Выводы
Плюсы:
- Открытый код ArduPilot;
- Фиксация в пространстве по GPS и барометру;
- Высокая дальность полета;
- Большой ресурс моторов;
- Совместимость с очками FPV.
Минусы:
- Плохая маневренность во время порывов ветра;
- Не очень качественная сборка.
Walkera QR X350 PRO скорее даже не дрон, а своего рода испытательный полигон для любителей электроники. Его внутреннюю начинку можно менять по своему усмотрению, а несколько вариантов комплектации позволяют подобрать оборудование под свои индивидуальные нужды.  Этот дрон сделан специально для опытных пользователей, он является своебразным топом любительского сегмента. Новичку подойдут более простые модели, готовые к полету «из коробки». Как вариант, можно присмотреться к квадрокоптерам Syma — X8HG либо X8SW.
Этот дрон сделан специально для опытных пользователей, он является своебразным топом любительского сегмента. Новичку подойдут более простые модели, готовые к полету «из коробки». Как вариант, можно присмотреться к квадрокоптерам Syma — X8HG либо X8SW.
Видео-обзор Walkera QR X350 Pro
https://www.youtube.com/watch?v=Bd241DbKRX0&t=1s Также интересные модели дронов вы можете найти в наших рейтингах: «Лучшие дроны с камерой на Алиэкспресс» и «ТОП-10 бюджетных квадрокоптеров для съемки видео«.
Читайте на сайтеОбзор Smart Balance OffRoad — гироскутер, который проедет по снегу в -30